AI新星系列報(bào)道之十六 | 吳均峰:為水下機(jī)器人裝上感知的“AI之眼”
當(dāng)陸地和空中機(jī)器人已在大街小巷舞蹈炫技,占地球71%面積的海洋卻仍是AI技術(shù)的“藍(lán)海”。香港中文大學(xué)(深圳)吳均峰教授團(tuán)隊(duì)正以創(chuàng)新算法突破水下感知交互,為機(jī)器人裝上感官的“AI之眼”。
吳教授的研究團(tuán)隊(duì)主要關(guān)注水下機(jī)器人的感知能力,包括視覺、聲學(xué)傳感器等多種傳感器的融合。他們致力于讓機(jī)器人能夠在復(fù)雜的水下環(huán)境中進(jìn)行自主導(dǎo)航和任務(wù)執(zhí)行。吳教授表示: “我們的目標(biāo)是讓水下機(jī)器人能夠在未知環(huán)境中完成任務(wù),這需要對(duì)環(huán)境有深刻的感知和理解能力。”
?
破解“水下無(wú)人區(qū)”技術(shù)困局? 給機(jī)器人裝上“海洋AI大腦”
“在水下1米,攝像頭就形成高度近視;10米以上,電磁波失去傳播能力。”吳教授以此揭示水下機(jī)器人的困境。其團(tuán)隊(duì)面對(duì)三重技術(shù)封印:光學(xué)視覺造成的“迷霧視覺”、電磁波拒止導(dǎo)致的“信號(hào)孤島”,以及稀缺的水下訓(xùn)練數(shù)據(jù)。作為從零起步的團(tuán)隊(duì),他們的研究將為AI技術(shù)在海洋領(lǐng)域的應(yīng)用注入新的可能。
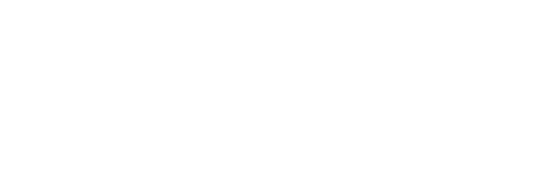
博士生陳同學(xué)基于UE5構(gòu)建了全面的仿真測(cè)試平臺(tái)。該平臺(tái)利用UE5先進(jìn)的物理引擎和渲染系統(tǒng),生成高度逼真的海底場(chǎng)景,包括復(fù)雜地形、珊瑚水草等植被和沉積物等細(xì)節(jié)。系統(tǒng)能夠模擬不同渾濁度的水下環(huán)境,并實(shí)時(shí)輸出高質(zhì)量的深度圖像和模擬聲吶數(shù)據(jù),這為快速驗(yàn)證水下機(jī)器人的感知、定位、導(dǎo)航算法提供了仿真基礎(chǔ)。在此基礎(chǔ)上,團(tuán)隊(duì)開發(fā)的神經(jīng)網(wǎng)絡(luò)模型,結(jié)合機(jī)器人對(duì)海床環(huán)境的先驗(yàn)知識(shí)和時(shí)序上的歷史信息,實(shí)現(xiàn)了從二維聲吶數(shù)據(jù)到三維空間理解的跨越。系統(tǒng)通過里程計(jì)對(duì)獲取的傳感器信息進(jìn)行空間配準(zhǔn),正在實(shí)現(xiàn)對(duì)復(fù)雜海底環(huán)境的三維重建。
面對(duì)水下環(huán)境數(shù)據(jù)稀缺的難題,他們通過先進(jìn)的仿真技術(shù)來克服這一挑戰(zhàn)。 “真實(shí)數(shù)據(jù)的采集成本極高,因此我們團(tuán)隊(duì)正開發(fā)基于虛擬仿真引擎的算法訓(xùn)練平臺(tái),”吳教授介紹道, “它可以模擬水下感知環(huán)境,為算法優(yōu)化提供了寶貴的數(shù)據(jù)支持。”
?
實(shí)驗(yàn)室里的“深藍(lán)艦隊(duì)”
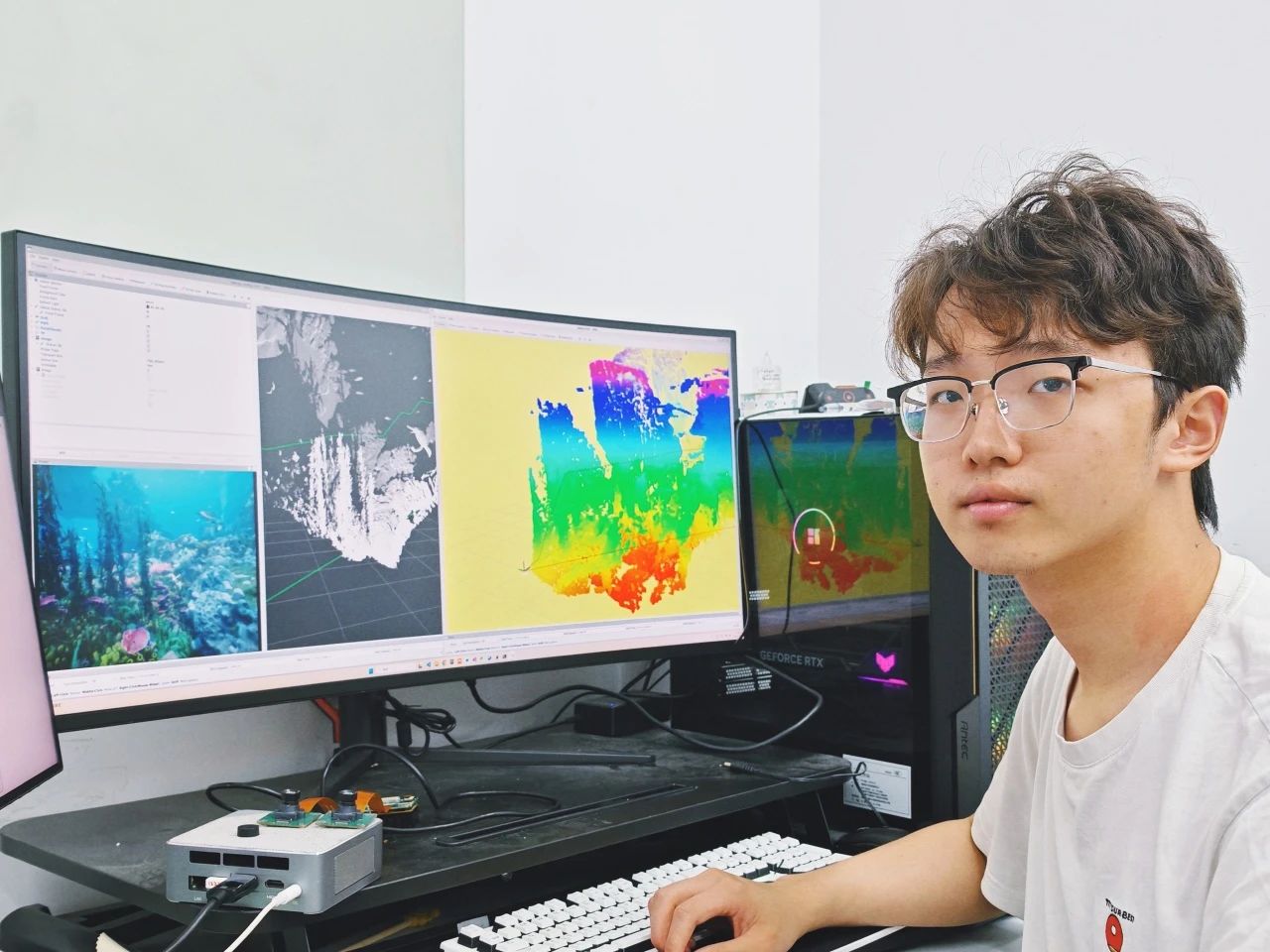
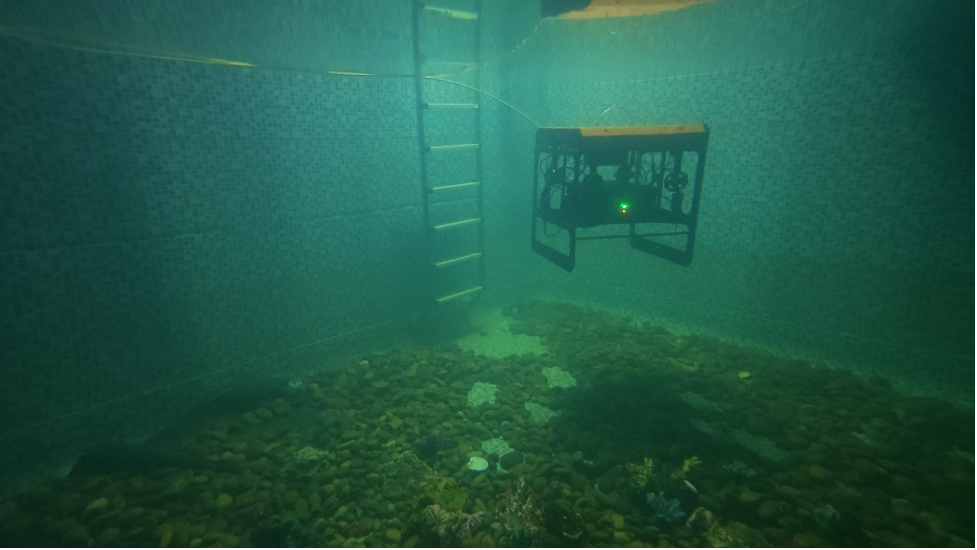
在實(shí)驗(yàn)室的方形試驗(yàn)池中,一臺(tái)智能水下機(jī)器人正在進(jìn)行水下真機(jī)實(shí)驗(yàn)。研究團(tuán)隊(duì)通過聲吶定位與多模態(tài)感知兩項(xiàng)核心實(shí)驗(yàn),推動(dòng)深海自主探測(cè)技術(shù)實(shí)現(xiàn)突破性進(jìn)展。池底鋪設(shè)著帶有精密反聲學(xué)結(jié)構(gòu)的標(biāo)定裝置。搭載前視成像聲吶的機(jī)器人對(duì)其進(jìn)行掃描,同時(shí)持續(xù)發(fā)射高頻聲波信號(hào)并采集反射特征。在算法驗(yàn)證環(huán)節(jié),機(jī)器人沿預(yù)設(shè)的“8”字形及“LIAS” (吳均峰教授領(lǐng)導(dǎo)的智能自主系統(tǒng)實(shí)驗(yàn)室“The Laboratory for Intelligent Autonomous Systems”的英文縮寫)字樣軌跡運(yùn)動(dòng),軌跡設(shè)計(jì)包含連續(xù)急轉(zhuǎn)、慣性滑行等典型運(yùn)動(dòng)模態(tài)。 “這類復(fù)合路徑能產(chǎn)生各向的位姿變化,能夠全面驗(yàn)證定位算法在急轉(zhuǎn)、急停等復(fù)雜運(yùn)動(dòng)狀態(tài)下的位姿解算精度。”項(xiàng)目負(fù)責(zé)學(xué)生解釋道。
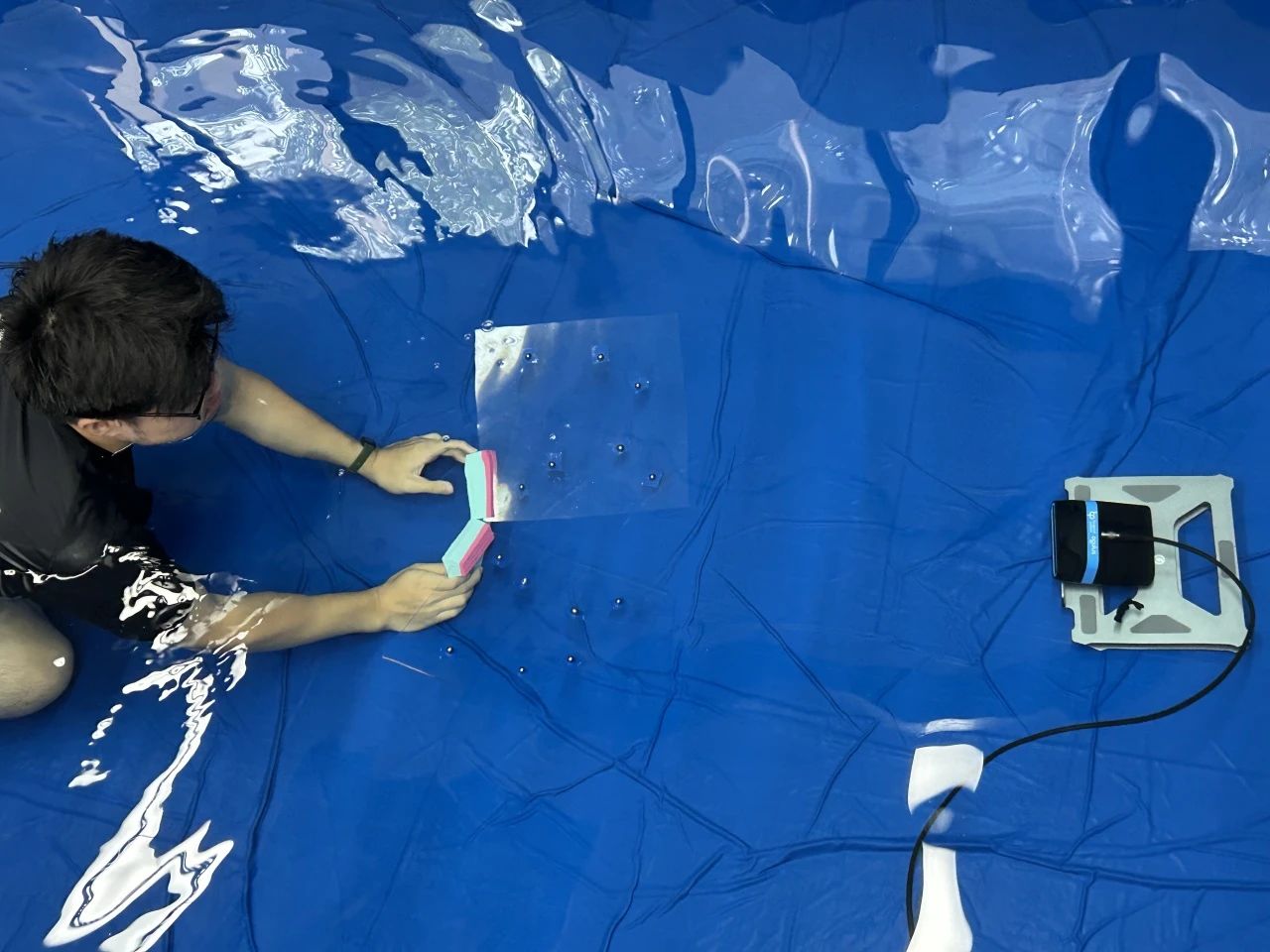
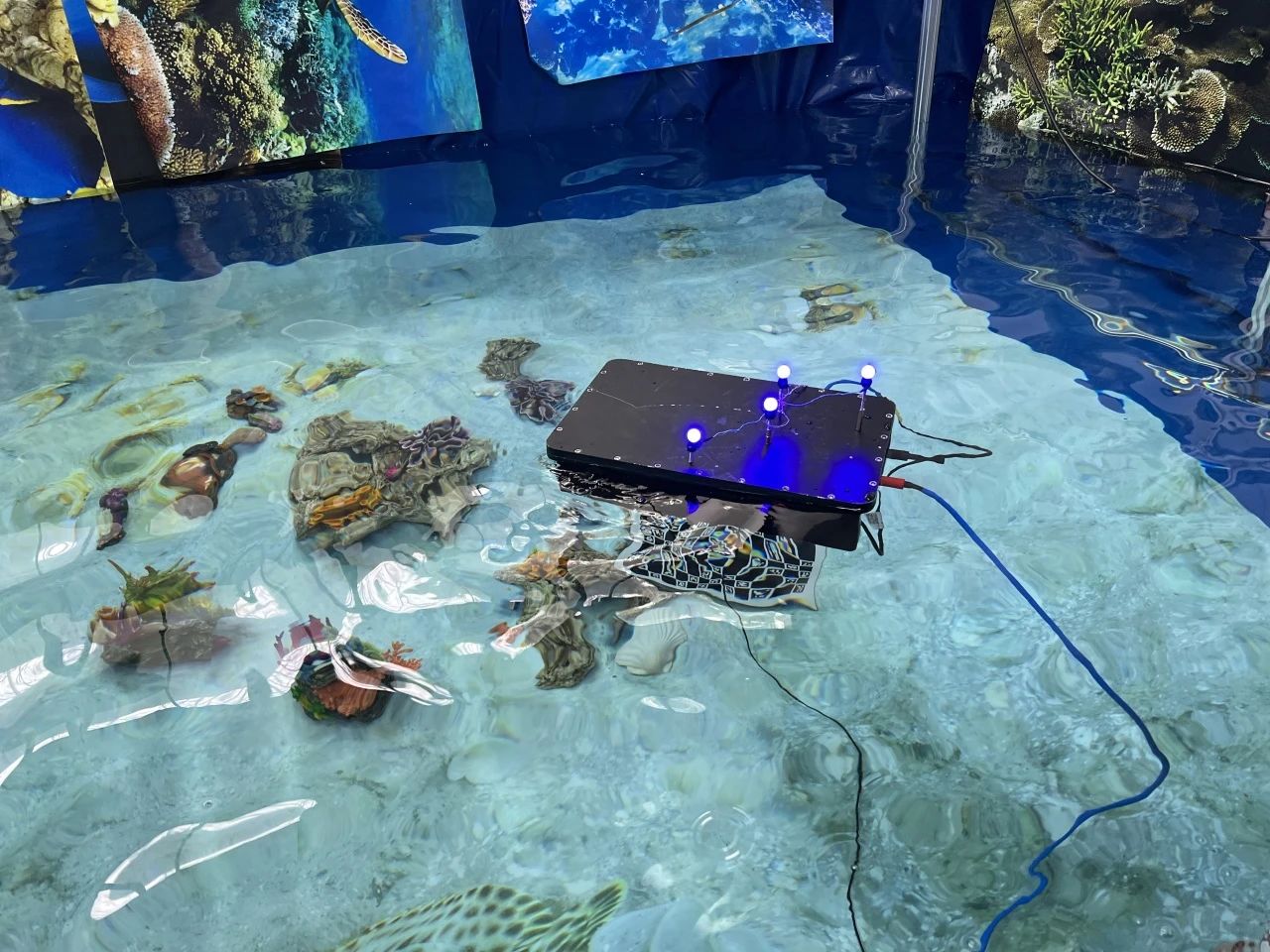
相鄰實(shí)驗(yàn)區(qū)被打造為微縮海底環(huán)境:細(xì)沙基底上分布著3D打印的海洋生物群落與礁石結(jié)構(gòu)。裝備多傳感器套件的機(jī)器人執(zhí)行著精密探測(cè)程序:在螺旋軌跡繞行礁石時(shí),事件相機(jī)憑借毫秒級(jí)響應(yīng)特性捕捉水下動(dòng)態(tài)光場(chǎng)變化;勻速巡航階段,多普勒測(cè)速儀(DVL)實(shí)時(shí)測(cè)量對(duì)底速度并同步構(gòu)建三維點(diǎn)云;進(jìn)入重點(diǎn)勘測(cè)區(qū)域后,機(jī)器人啟動(dòng)十字模式——沿正交軸線執(zhí)行往復(fù)掃描,實(shí)現(xiàn)光學(xué)影像與聲學(xué)特征的空間配準(zhǔn)。項(xiàng)目負(fù)責(zé)學(xué)生透露,單次實(shí)驗(yàn)可采集超過50GB的多源異構(gòu)數(shù)據(jù),這些數(shù)據(jù)正被用于訓(xùn)練新一代多模態(tài)感知融合算法,目標(biāo)是為深海機(jī)器人構(gòu)建“聲—光聯(lián)合感知”智能系統(tǒng)。當(dāng)實(shí)驗(yàn)室的漣漪終將匯入遠(yuǎn)洋的浪潮,這支"深藍(lán)艦隊(duì)"的航跡或?qū)⒅匦露x人類探索深海的方式。

吳均峰教授團(tuán)隊(duì)的研究聚焦于水下機(jī)器人感知技術(shù)的核心問題——如何提升機(jī)器人對(duì)復(fù)雜水下環(huán)境的理解能力。 “水下環(huán)境探索剛剛起步,缺乏GPS信號(hào),同時(shí)電磁波傳播極為有限,”吳教授解釋道, “我們依靠聲學(xué)、視覺和慣性測(cè)量單元等多種感知方式,彌補(bǔ)環(huán)境中的信息丟失。”通過結(jié)合先進(jìn)的傳感器與算法,團(tuán)隊(duì)正在逐步攻克水下環(huán)境中感知低精度、信號(hào)噪聲大的難題。
團(tuán)隊(duì)的研究不僅僅停留在數(shù)據(jù)采集,還進(jìn)一步探索如何實(shí)現(xiàn)機(jī)器人與環(huán)境的交互。 “未來的水下機(jī)器人不僅需要感知周圍環(huán)境,更需要機(jī)器人具備與環(huán)境自主交互的能力,”吳教授, “例如在海洋搶險(xiǎn)救援、水下勘探考古、環(huán)境保護(hù)等多樣化場(chǎng)景中,都需要機(jī)器人具有自主規(guī)劃任務(wù)和決策、以及執(zhí)行任務(wù)的能力,以應(yīng)對(duì)復(fù)雜多變的水下環(huán)境挑戰(zhàn)。
?
產(chǎn)學(xué)研航向深藍(lán)
香港中文大學(xué)(深圳)的吳均峰教授與香港中文大學(xué)的生命科學(xué)學(xué)院的研究人員近期展開了一項(xiàng)關(guān)于海洋生態(tài)觀測(cè)的深度合作,旨在通過跨校聯(lián)合研究提升對(duì)海洋生態(tài)系統(tǒng)的科學(xué)認(rèn)知,并為海洋環(huán)境保護(hù)與可持續(xù)發(fā)展提供創(chuàng)新解決方案。這一合作結(jié)合了雙方在海洋科學(xué)、環(huán)境監(jiān)測(cè)及數(shù)據(jù)技術(shù)領(lǐng)域的優(yōu)勢(shì),有望為粵港澳大灣區(qū)的海洋生態(tài)研究注入新的活力。
海洋生態(tài)系統(tǒng)在全球氣候調(diào)節(jié)、生物多樣性維護(hù)及資源供給方面具有不可替代的作用。然而,近年來受氣候變化、污染和過度開發(fā)的影響,海洋生態(tài)面臨嚴(yán)峻挑戰(zhàn)。港中大(深圳)數(shù)據(jù)科學(xué)學(xué)院長(zhǎng)期致力于海洋機(jī)器人研究,而港中大的生命科學(xué)學(xué)院在海洋生態(tài)和保育具有豐富經(jīng)驗(yàn)。雙方的合作將聚焦于高精度海洋生態(tài)觀測(cè)技術(shù)的開發(fā)與應(yīng)用,通過AUV監(jiān)測(cè)及水下傳感器網(wǎng)絡(luò),構(gòu)建多維度的海洋生態(tài)數(shù)據(jù)庫(kù),為政策制定和生態(tài)保護(hù)提供科學(xué)依據(jù)。
粵港澳大灣區(qū)擁有豐富的海洋資源,但同時(shí)也面臨近海污染、棲息地退化等問題。此次合作不僅能為大灣區(qū)海洋生態(tài)管理提供技術(shù)支持,還可通過國(guó)際學(xué)術(shù)網(wǎng)絡(luò)(如與亞太海洋科學(xué)組織的聯(lián)動(dòng))將成果推廣至全球。未來,雙方計(jì)劃推動(dòng)學(xué)生交流項(xiàng)目,培養(yǎng)跨學(xué)科的海洋科研人才。
吳均峰教授與西班牙國(guó)家海洋研究所正在開展對(duì)海洋生態(tài)目標(biāo)追蹤的研究,利用強(qiáng)化學(xué)習(xí)和SLAM技術(shù)增強(qiáng)水下機(jī)器人自主作業(yè)的能力。雙方團(tuán)隊(duì)提出一種創(chuàng)新架構(gòu):通過多智能體強(qiáng)化學(xué)習(xí)優(yōu)化AUV群的協(xié)同追蹤策略,使其能自主適應(yīng)目標(biāo)生物(如鯨類、魚群)的突發(fā)運(yùn)動(dòng);同時(shí),利用分布式SLAM技術(shù)實(shí)時(shí)構(gòu)建三維海洋環(huán)境地圖,解決水下定位誤差累積問題。例如,當(dāng)追蹤瀕危物種時(shí),系統(tǒng)可基于歷史遷徙數(shù)據(jù)訓(xùn)練RL模型,預(yù)測(cè)生物運(yùn)動(dòng)軌跡,并通過SLAM動(dòng)態(tài)修正AUV的路徑規(guī)劃,顯著提升追蹤效率。
最近,吳均峰教授與國(guó)際同行合作,在機(jī)器人國(guó)際會(huì)議IEEE IROS2025組織Oceantech: Marine Robotics & Science Workshop,致力于促進(jìn)海洋機(jī)器人領(lǐng)域的國(guó)際交流與協(xié)同創(chuàng)新,助力“藍(lán)色科技”發(fā)展。
?
AI賦能深藍(lán)未來
吳均峰教授團(tuán)隊(duì)從零起步,在短時(shí)間內(nèi)組建了充滿熱情與創(chuàng)造力的科研團(tuán)隊(duì)。 “我們的團(tuán)隊(duì)成員來自不同的背景,但他們對(duì)水下機(jī)器人研究的共同熱情將我們的凝聚在一起了,”吳教授說道。未來,團(tuán)隊(duì)計(jì)劃進(jìn)一步提升機(jī)器人的自主決策能力。 “我們希望開發(fā)出能夠適應(yīng)各種復(fù)雜情況的通用算法,讓機(jī)器人不僅能夠感知環(huán)境,還能自主完成任務(wù),”吳教授展望道。
從理論到實(shí)驗(yàn)室再到現(xiàn)實(shí),吳教授團(tuán)隊(duì)的研究不僅推動(dòng)了水下機(jī)器人技術(shù)的進(jìn)步,更為AI技術(shù)在海洋領(lǐng)域的應(yīng)用開辟了新的方向。未來,在這些“逐夢(mèng)人”的努力下,水下機(jī)器人必將成為人類探索深藍(lán)世界的得力助手,為科技與生態(tài)的可持續(xù)發(fā)展做出重要貢獻(xiàn)。
?
青年教授簡(jiǎn)介

吳均峰
港中大(深圳)數(shù)據(jù)科學(xué)學(xué)院副教授
吳均峰教授現(xiàn)為香港中文大學(xué)(深圳)副教授。吳教授于2009年獲得浙江大學(xué)學(xué)士學(xué)位,2013年獲得香港科技大學(xué)博士學(xué)位。2013年,吳教授在香港科技大學(xué)擔(dān)任博士后;2014年至2017年先后擔(dān)任瑞典皇家理工學(xué)--院博士后和研究員。自2017年到2021年,他在浙江大學(xué)任特聘研究員。吳教授的研究興趣主要在水下機(jī)器人,機(jī)器人學(xué)中的狀態(tài)估計(jì),機(jī)器人系統(tǒng)的安全與隱私,感知、狀態(tài)估計(jì)與控制系統(tǒng)等。
他是國(guó)家級(jí)青年人才,被授予了多個(gè)獎(jiǎng)項(xiàng)。2015年獲第34屆中國(guó)控制會(huì)(CCC2015)關(guān)肇直獎(jiǎng)。2016年獲澳大利亞政府的澳大利亞政府Endeavour Research Fellowship。2019年獲日本JSPS Invitational Fellowship。此外,他還獲得2021年吳文俊人工智能技術(shù)發(fā)明獎(jiǎng)一等獎(jiǎng),2024年中國(guó)自動(dòng)化學(xué)會(huì)自然科學(xué)獎(jiǎng)二等獎(jiǎng)。