林天麟教授在模塊化自重構機器人領域取得重大突破
香港中文大學(深圳)理工學院、深圳市人工智能與機器人研究院林天麟教授團隊長期從事模塊化可重構機器人及多機器人系統的研究,近年來在知名國際學術期刊上發表了一系列創新成果。
2023年,林天麟教授帶領團隊在機器人領域頂級期刊T-RO上共發表了5篇論文。根據dblp數據庫的統計數據顯示,林天麟教授是T-RO創刊歷史上單年發文量居首位的學者之一,在單年內以獨立通訊作者身份發表了5篇論文。這是對林教授團隊在該領域的技術積累和研究貢獻的肯定,也展現了香港中文大學(深圳)在粵港澳大灣區乃至國內機器人領域的科研實力。
教授介紹

林天麟,是機器人與智能制造國家地方聯合工程實驗室常務副主任,深圳市人工智能與機器人研究院中心主任,廣東省杰出青年基金獲得者,IEEE高級會員。
他師從港中大(深圳)校長徐揚生院士,分別于2006年和2010年在香港中文大學獲得一等榮譽學士學位和博士學位。林教授長期從事模塊化機器人、多機器人系統及特種機器人的研究工作,至今在T-RO、TPAMI、TMECH、TIP、TNNLS等機器人與人工智能領域知名期刊及會議發表論文100余篇,其中2023年以獨立通訊作者身份在T-RO發表論文5篇;獲TMECH年度最佳論文獎、IROS機器人機構設計最佳論文獎。作為項目負責人,林教授主持國家自然科學基金委、國家科技部、廣東省科技廳、深圳市科創委的多項科研課題。其相關研究成果多次被路透社、探索頻道、IEEE Spectrum等眾多國際知名媒體報導。
團隊簡介

Freeform Robotics團隊由林天麟教授領導,于2019年成立,旨在研究多機器人系統自由組成各種形態以解決不可預知問題的關鍵技術,通過簡單智能體的集群實現復雜的智能群體行為,讓機器人系統擁有可復用、自由構型、可拓展、故障自修復等通用特性,為機器人設計領域創造出一種全新切實可行的實現形態。團隊長期從事機器人和人工智能研究,承擔來自國家自然科學基金委、國家科技部、廣東省科技廳、深圳市科創委等多項重要研究項目;科研成果發表于T-RO、TPAMI、TMECH、TIP等機器人與人工智能領域的國際期刊和會議上。關于模塊化自重構機器人FreeBOT的研究成果獲2020年IROS機器人機構與設計最佳論文獎,IEEE Spectrum、日本放送協會NHK和Engadget 等多家國際知名媒體對其進行了廣泛報道。
?
期刊介紹
IEEE Transactions on Robotics(T-RO)是電氣電子工程師學會(IEEE)于1985年創辦的機器人領域頂級學術期刊,該期刊發表的研究論文代表了機器人領域最先進的重大進展,內容廣泛涉及理論、設計、實驗研究、分析、算法、集成以及應用案例研究等多個前沿領域,要求在理論和工程實踐方面共同推動機器人學的發展。
?
01 球形滾動接觸運動建模及控制
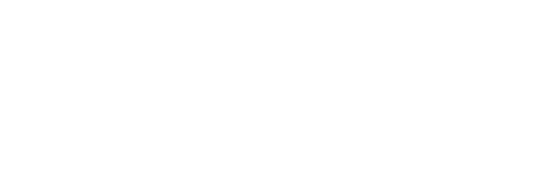
2023年2月,IEEE T-RO在線發表題為“Kinematics Modeling and Control of Spherical Rolling Contact Joint and Manipulator”的論文。該論文首次提出并討論了球形滾動接觸運動。香港中文大學(深圳)博士后宗立軍為論文第一作者,林天麟教授為論文獨立通訊作者。

滾動點接觸運動因其減小磨料磨損、擴大構型空間、簡化控制器設計等優勢而被廣泛應用于球形機器人、多指機器人手、機械臂關節等運動系統。然而,目前關于圓形滾動點接觸(CRC)關節的研究僅限于1-DOF。本文引入了兩個滾動點接觸運動球之間的虛擬切平面概念,通過四元數和軸-角表示,簡明扼要地描述了SRC關節的運動,并建立了SRC關節的所有模型要素,包括旋轉矩陣、位置向量和自由模態等。利用SRC關節模型和阻尼最小二乘法等方法,系統規范地建立了SRC關節機械臂的正逆運動學方程。
本文以改進的模塊化自重構機器人FreeBOT為例,實現了SRC關節和機械臂的運動。基于物理仿真引擎構建了SRC關節機械臂的仿真環境,真實模擬了SRC關節機械臂的物理運動。同時,利用FreeBOT搭建了SRC關節機械臂的實物系統。在仿真系統和實物上驗證了SRC關節和機械臂的運動模型以及FreeBOT的運動規劃與控制方法,機械臂末端執行器的運動精度在同時控制位置時達到位置誤差小于4mm,姿態誤差小于1.5°;同時驗證了在狹窄空間內,SRC 關節機械臂能夠實時地躲避障礙物,并且機械臂末端執行器高精度地到達期望位姿。
論文鏈接:https://ieeexplore.ieee.org/document/9858332
?
02 球形模塊化可重構機器人的連接規劃
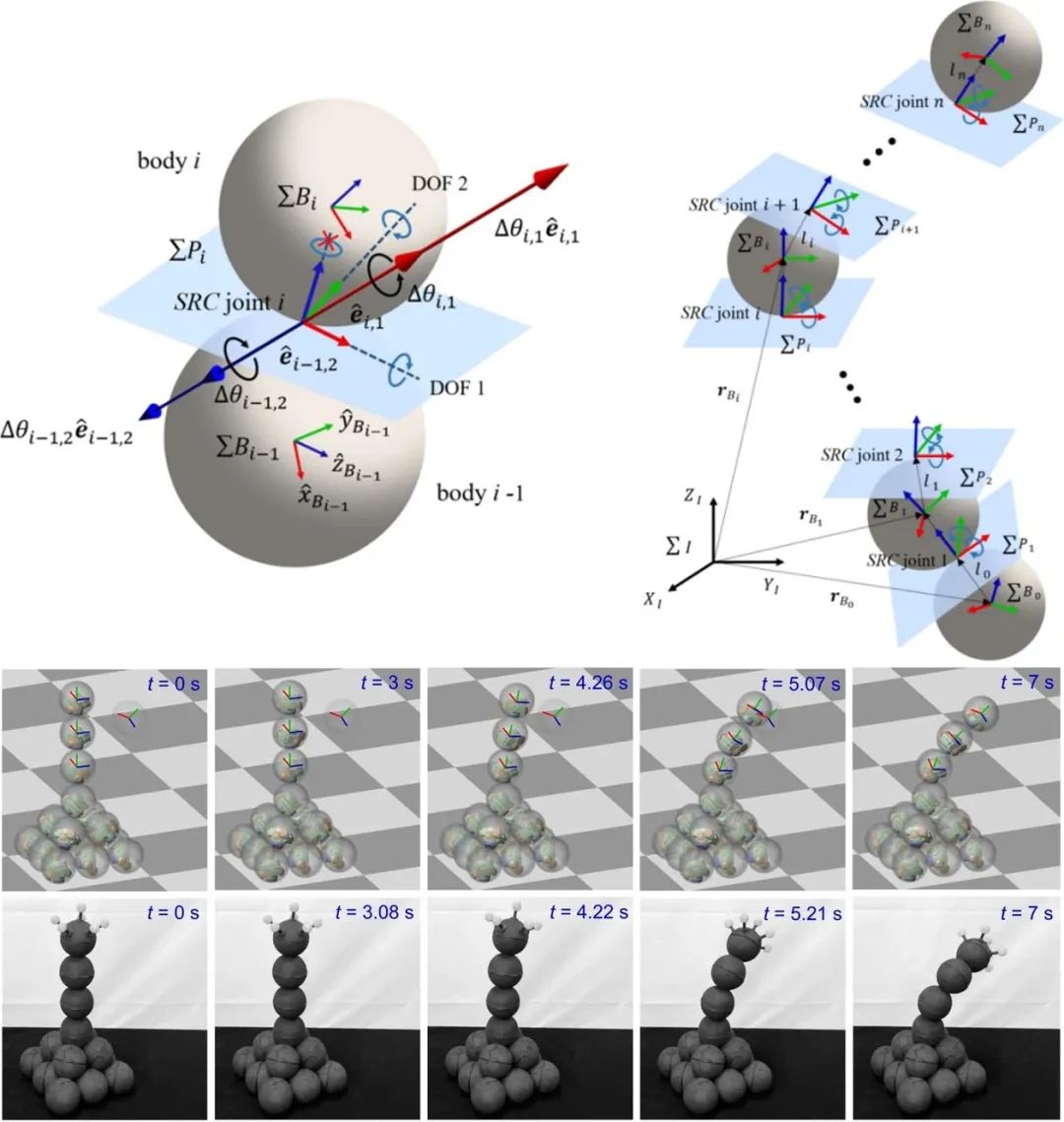
2023年4月,IEEE T-RO在線發表題為“Auto-Optimizing Connection Planning Method for Chain-Type Modular Self-Reconfiguration Robots”的論文。該論文提出了鏈式模塊化機器人的一種連接規劃方法。香港中文大學(深圳)博士生羅浩波為論文第一作者,林天麟教授為論文獨立通訊作者。

模塊化自重構機器人能夠根據環境和任務在不同的構型之間轉換,連接規劃算法指定了重構過程中每一步應該斷開或新建的連接。連接規劃結果的效率決定了整個自重構過程的速度。以往的研究已經證明最優連接規劃問題的NP完全性,意味著多項式時間內難以找到最優解。當前研究的兩個主要方向是計算近優解的多項式時間算法和計算最優解的指數時間算法。
本文首先將硬件模塊抽象為多入度單出度(MISO)模塊,其中模塊的被動連接點總數和主動連接點總數可以分別被轉化為圖論中節點的入度和出度。構型的連接關系可以表達為鄰接矩陣,進而繪制為簡單有向圖。本文提出了入度匹配(IM)算法,其中提出了子樹相異度的概念,利用連接點的可交換性減少冗余步驟,以獲得初始構型和最終構型的公共子圖。
本文介紹了樹型分支與定界(TBB)算法,其中提出了新的分支策略和階段成本,并從理論上證明了 TBB 在指數時間內保證到達全局最優解的計算復雜度。通過判斷子匹配節點的累加階段成本并剪枝從而減小搜索空間。TBB算法的上界由多項式時間算法的解的代價初始化,在每次得到一個近優解時逐步下調,最終逼近全局最優解。
論文鏈接:https://ieeexplore.ieee.org/document/9962372
?
03 異構多智能體強化學習在多機器人系統中的應用
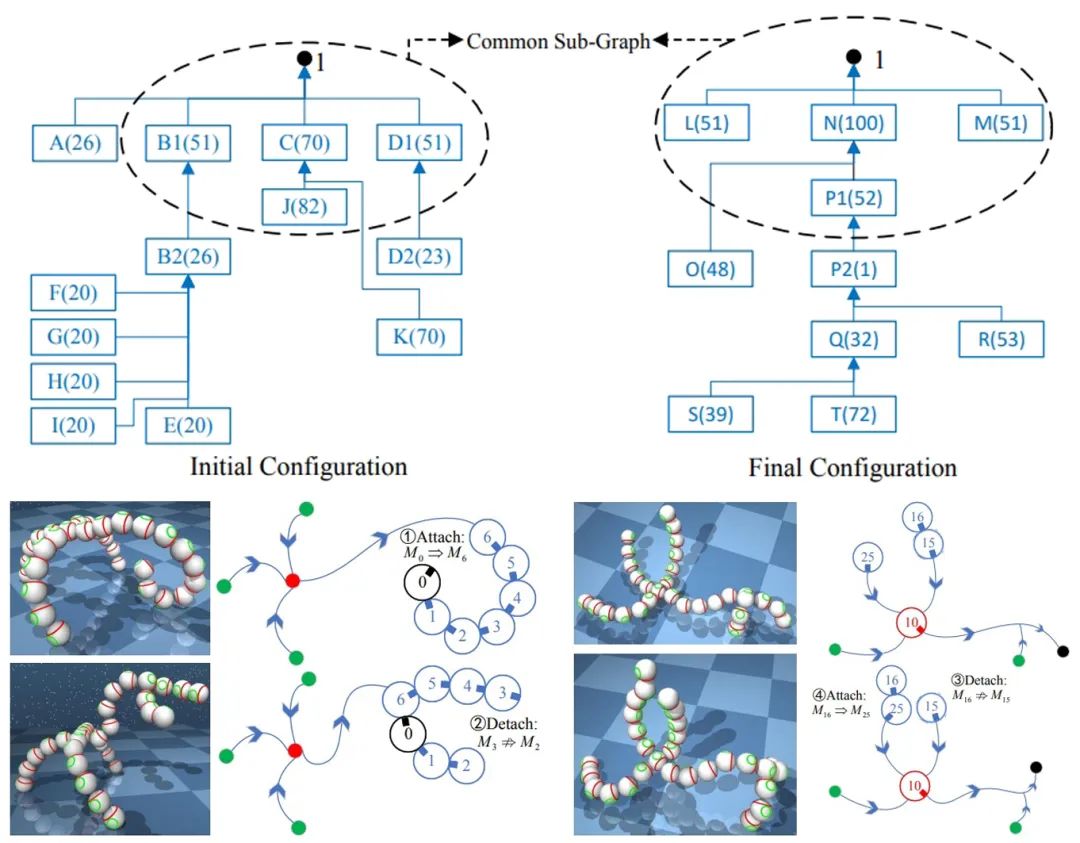
2023年8月,IEEE T-RO在線發表題為“Asymmetric Self-Play-Enabled Intelligent Heterogeneous Multirobot Catching System Using Deep Multiagent Reinforcement Learning”的論文。該論文提出了一種創新的多智能體強化學習框架,并實現其在機器人圍捕任務中的應用。深圳市人工智能與機器人研究院高源博士為論文第一作者,林天麟教授為論文獨立通訊作者。

多機器人系統是一個涉及協調和控制多個機器人的復雜性問題領域。目前,已經有很多關于同構機器人的研究,但越來越多的關注點集中在具有不同功能和特點、共同工作的異構設置上。
本文提出了一種基于演員-評委(Actor-Critic)多智能體強化學習框架,旨在解決異構機器人團隊在合作博弈中的挑戰。該框架通過融合不對稱自我博弈和課程學習技術,實現了異構機器人團隊之間的合作行為。這一創新框架使得異構多機器人系統能夠在真實世界的約束條件下執行復雜的捕捉任務。研究團隊進行了模擬實驗,以評估不同機制對方法性能的影響,并通過現實世界試驗評估了系統在復雜真實圍捕問題中的表現。此外,研究團隊進行了與S2M2方法的橋接研究,結果表明本文所提方法在對抗性環境下表現更優越。通過在訓練期間融合不對稱自我博弈和課程學習的框架,研究團隊成功地在模擬和真實世界約束條件下完成了異構多機器人團隊的捕捉任務,為未來大規模智能安全與救援異構多機器人團隊提供了有力的方向。
論文鏈接:https://ieeexplore.ieee.org/document/10101687
?
04模塊化自由重構機器人及構型識別
2023年12月,IEEE T-RO在線發表題為“Configuration Identification for a Freeform Modular Self-reconfigurable Robot – FreeSN”的論文。該論文提出了一個自由連接及桁架結構的模塊化自重構機器人系統,并實現了其構型感知功能。香港中文大學(深圳)博士生涂宇嘯為論文第一作者,林天麟教授為論文獨立通訊作者。
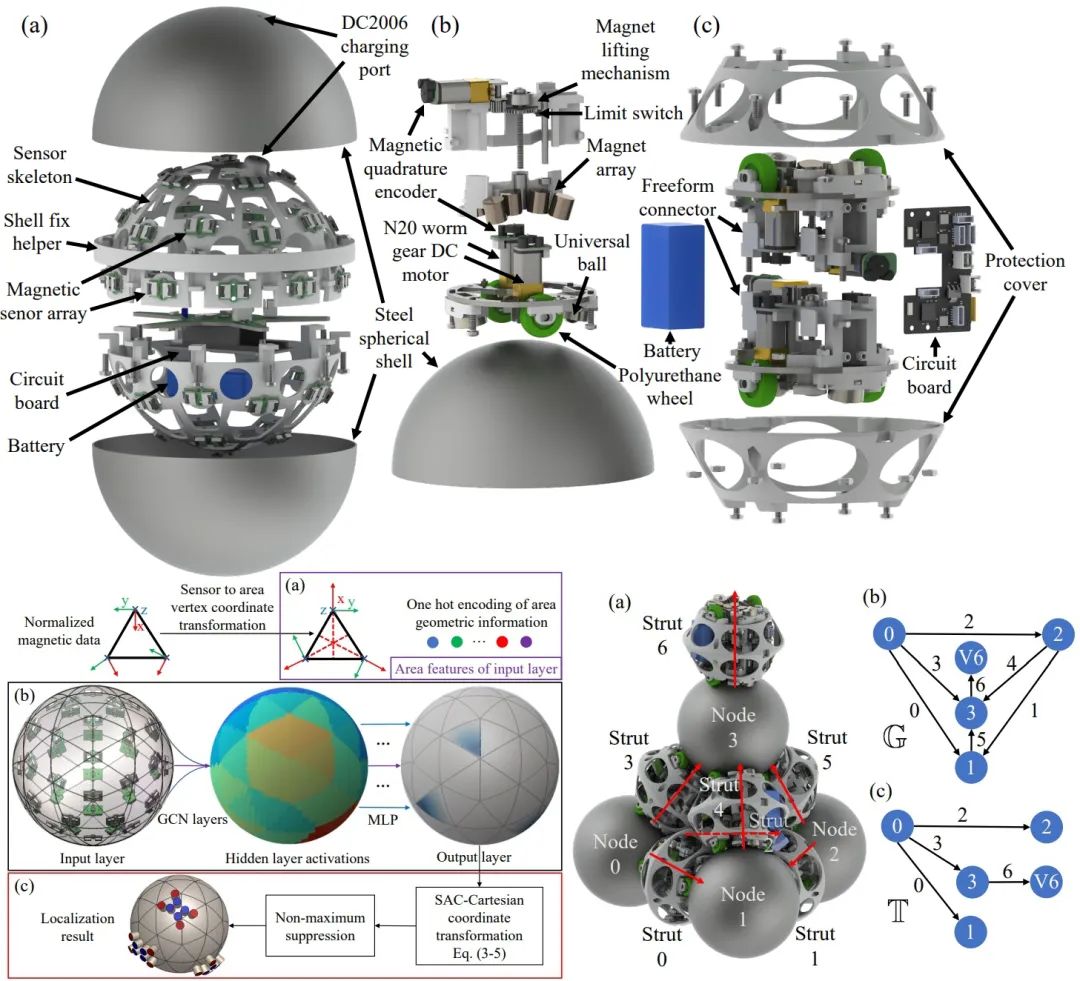
與傳統機器人系統相比,模塊化自重構機器人系統具有更強的魯棒性和適應性。在本研究中,研究團隊提出了一種名為FreeSN的新型自由連接及桁架結構的模塊化自重構機器人系統,其由節點模塊和連桿模塊組成。節點模塊的表面覆蓋著鐵球殼,并集成了磁傳感器陣列。而連桿模塊則包含兩個磁性自由連接器,可連接到節點模塊的任意位置并實現運動。
在本文中,研究團隊引入了一種適用于FreeSN的創新構型感知系統,其中包括連接點磁定位、模塊識別、模塊相對位姿融合和系統構型估計等方面。節點模塊內置的磁傳感器陣列可感知周圍磁場的變化,通過基于圖卷積神經網絡的磁定位方法,節點模塊能夠定位連桿模塊的中心點并進行實時追蹤。同時,連桿模塊通過微調磁鐵陣列的位置改變周圍區域的磁場,從而與節點模塊進行磁通訊,實現鄰接模塊的準確識別。接著,通過將磁定位結果與慣性測量單元和輪式里程計數據進行融合,能夠估計鄰接模塊的相對姿態。最終,該構型感知系統可以全面估計機器人系統的全局構型,包括連接拓撲圖和所有模塊的相對位姿。基于該構型感知系統,FreeSN得以實現閉環控制,從而實現系統的特定行為。研究團隊通過一系列精度評估實驗和兩個基于庫的閉環自動化控制演示對該構型感知系統進行了驗證。
論文鏈接:https://ieeexplore.ieee.org/document/10232916
?
05 球形齒輪結構及其靈巧關節應用
2023年12月,IEEE T-RO在線發表題為“DISG: Driving-Integrated Spherical Gear Enables Singularity-Free Full-Range Joint Motion”的論文。該論文提出了一個新穎的驅動集成球形齒輪結構并討論了其作為靈巧關節的特性。香港中文大學(深圳)博士生梁冠琪為論文第一作者,林天麟教授為論文獨立通訊作者。

近年來,機器人領域對靈巧關節的興趣日益增加,特別是球形齒輪引起了廣泛關注。球形齒輪作為傳統平面齒輪的三維擴展,具備多個旋轉自由度,能夠改變空間方向,因此在實現多自由度單關節方面展現出巨大的潛力和優勢。然而,目前對球形齒輪的研究主要集中在被動齒輪的設計上,而現有基于球形齒輪的傳動機構在靈巧性和運動范圍方面仍有待提升。
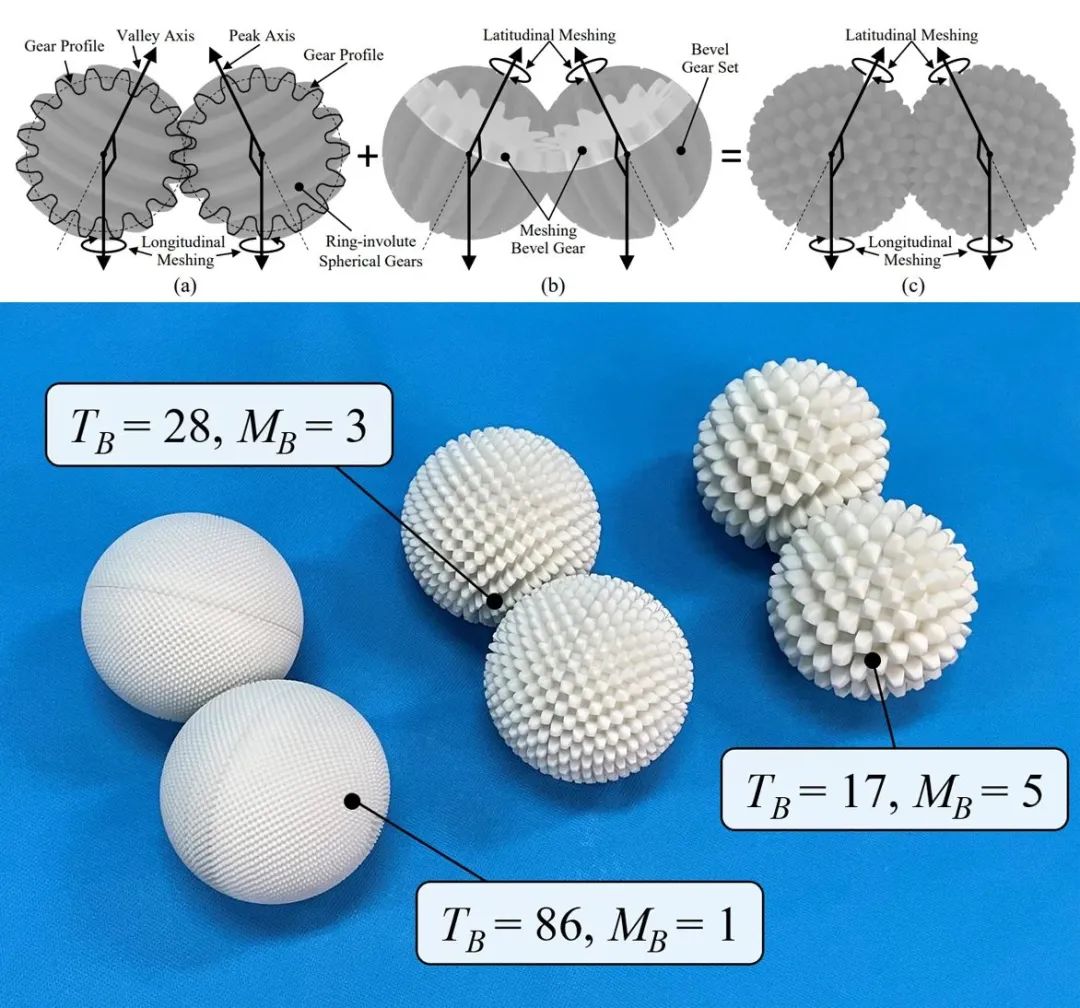
本文介紹了一種創新的驅動集成球形齒輪(DISG),提出了一種全球面嚙合和可驅動的球形齒輪結構,由在經度和緯度方向上均能嚙合的球形齒輪組合而成。此外,通過主動驅動磁體和被動跟隨磁體跨越上述球形齒輪,保持磁性連接,實現了兩個球形齒輪之間的全球面可驅動功能,從而實現了一個靈巧的多自由度滾動接觸關節。通過運動學分析和一系列原型機實驗驗證,結果顯示DISG具備無奇異和全范圍工作空間的運動學特性。與其他關節執行器相比,DISG在靈巧性、運動范圍、緊湊性和輕量化方面都表現出顯著的優勢。
論文鏈接:https://ieeexplore.ieee.org/document/10266738
?