喜訊 | 理工學院機器人與人工智能實驗室多名本科學生的一作論文被IEEE ROBIO 2019接收
近日,機器人學與仿生學國際大會IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO)公布了2019年論文錄用情況,香港中文大學(深圳)理工學院機器人與人工智能實驗室有多篇論文被接收。其中,3篇的第一作者以及2篇的共同第一作者是理工學院本科生。
《一種新的自主帆船渦輪-風帆耦合推進系統》的作者為電子信息工程專業大四學生仇佳怡、侯佳凡和博士生劉崇鋒。《基于機載激光雷達定位算法下的多機器人協同搬運》的作者是電子信息工程專業大四學生胡智嫻和趙志翔。《自適應的帆船位置保持算法》的作者是電子信息工程專業大三學生馮澤遠。電子信息工程專業大四學生東奕冰同學、丁嘯同學及大三學生李治俊共同發表了論文《翼帆車的建模及系統驗證》。《基于由粗到細策略的強化學習的無人帆船避障》的作者是計算機科學與技術專業大四學生成子源。
?
論文
?IEEE ROBIO 2019接收香港中文大學(深圳)理工學院的本科生論文包括:
“An Adaptive Position Keeping Algorithm for Autonomous Sailboats”,Zeyuan Feng, Jiayi Qiu, Hengli Liu, Qinbo Sun, Ning Ding, Zhenglong Sun, Tin Lun Lam and Huihuan Qian
“A New Turbine-Sail Coupled Propulsive System for Autonomous Sailboats”,Jiayi Qiu, Jiafan Hou, Chongfeng Liu, Hengli Liu, Xiongwei Lin, Zhenglong Sun, Ning Ding, Tin Lun Lam, and Huihuan Qian
“Wing Sail Land-yacht Modeling and System Verification”,Yibing Dong, Xiao Ding, Zhijun Li (共同第一作者), Lianxin Zhang, Hengli Liu, Ning Ding, Zhenglong Sun, Huihuan Qian
“Obstacle Avoidance for Autonomous Sailboats via Reinforcement Learning with Coarse-to-fine Strategy”,Ziyuan Cheng, Weimin Qi, Qinbo Sun, Hengli Liu, Ning Ding, ?Zhenglong Sun, Tin Lun Lam and Huihuan Qian
“Collaborative Object Transportation by Multiple Robots with Onboard Object Localization Algorithm”,Zhixian Hu, Zhixiang Zhao(共同第一作者), Lianxin Zhang, Hengli Liu, Ning Ding, Zhenglong Sun, Lin Tun Lam, Huihuan Qian
?
大會介紹
?IEEE International Conference on Robotics and Biomimetics (IEEE ROBIO) 迄今為止已成功舉辦了15年, 是機器人領域亞太地區知名的國際會議。2019年的機器人學與仿生學國際大會于12月在中國云南大理召開。
?
成果速遞
01
在錢輝環教授的指導下,電子信息工程專業大四學生仇佳怡、侯佳凡和博士生劉崇鋒完成了《一種新的自主帆船渦輪-風帆耦合推進系統》。在遠洋航行時,無人帆船需要解決能源問題并更好地利用風能來獲得所需推進力。論文中提出一種在風帆兩側加上垂直發電機并實現發電機轉速可控的新型系統,探究該系統對帆船最大推進力的影響。根據大量在風洞實驗室中完成的實驗,論文發現在順風航行時該系統可以增大帆船所能得到的最大推進力。文章也證實,調節兩側發電機轉速,能進一步調節帆船可獲的最大推進力。

02
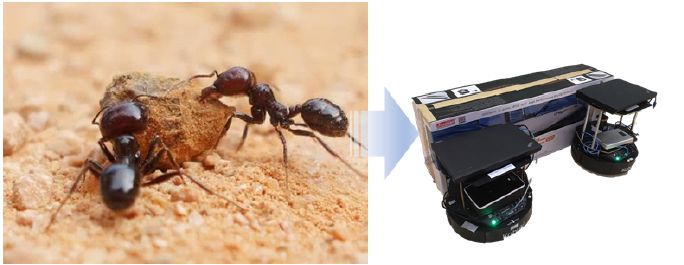
在研究助理教授孫正隆和博士生張連鑫的指導下,電子信息工程專業大四學生胡智嫻和趙志翔完成了《基于機載激光雷達定位算法下的多機器人協同搬運》。論文提出了新的機載激光雷達定位算法,并設計了一個較為普適的協同搬運控制策略。算法與策略的有效結合可以實現物體在被搬運過程中的軌跡跟蹤。在以往的協同搬運研究中,被搬運物體的定位基本是依靠額外的定位裝置或固定裝置。而論文提出的定位算法,在沒有額外裝置的幫助下,也能較為精準地確定被搬運物體位置。在已知物體位置的條件下,協同搬運控制策略可以實現對搬運過程的有效控制。真實場景中的實驗結果驗證了定位算法的有效性,而進一步的實驗證明了協同搬運策略的可行性。
03
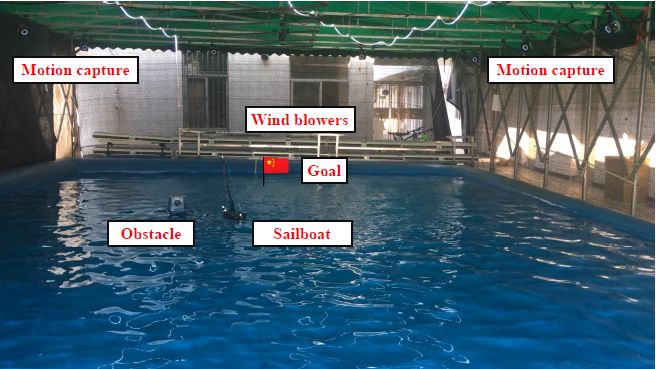
在博士后劉恒利及博士生孫欽波的指導下,電子信息工程專業大三學生馮澤遠完成了《自適應的帆船位置保持算法》。船舶的位置保持在實際中有很重要的應用,如定位水下無人艇,交換貨物,虛擬錨定等。由于帆船風驅動的特性,其位置保持頗有挑戰性,目前的算法通常忽略了環境擾動,特別是帆船松帆時風帶來的擾動,因而在實際場景下效果不佳。本文提出了一個更加魯棒的算法及底層控制器,使得帆船能在風速風向變化的情況下進行位置保持,并在仿真及實驗平臺下驗證了控制效果。
04
在博士生張連鑫指導下,電子信息工程專業大四學生東奕冰同學、丁嘯同學及大三學生李治俊共同創作的論文《翼帆車的建模及系統驗證》提出了一種實用的翼帆車的結構設計,對其進行建模并加以驗證。在陸帆車領域里,常用的軟帆車穩定性較差,并在行駛方向上有較大的局限性。而對于翼帆車的研究也常常局限在順風行駛的能力上。
這篇論文提出了一種基于硬質翼帆的帆車系統。該四輪翼帆車在行駛時具有良好的穩定性及可控性,且具有很大的可行駛方向范圍。同時,對翼帆進行的建模和仿真實驗以及在現實風場中進行的實驗驗證了該翼帆車在多角度逆風前進狀態下的良好行駛能力。

05
在博士生祁衛敏和孫欽波的指導下,計算機科學與技術專業大四學生成子源的在論文《基于由粗到細策略的強化學習的無人帆船避障》中提出了一種基于強化學習的細粒度到細粒度的帆船自主避障的方法。
船只的位置信息作為帆船避讓控制中一個十分重要的輸入,更準確的定位能有效提高避讓效率。具體地,在粗粒度下粗略定位帆船,進而可以跳轉到細粒度下獲得更準確的帆船位置。其中粗粒度階段用于控制帆船在距離障礙物較遠情況下的正常航行,而細粒度階段使帆船在距障礙物較近時能夠進行精確的避讓。我們不僅通過仿真驗證了算法的可行性與有效性,還在現實實驗中進行了測試,并取得了很好的避讓效果。值得一提的是,本篇論文已經獲得了最佳論文Final List獎勵。

?
導師介紹
01?
?
02
林天麟教授,香港中文大學(深圳)理工學院助理教授。他于2006年和2010年獲得香港中文大學一等榮譽工程學學士和自動化與計算機輔助工程系博士學位。他的研究方向主要是現場機器人技術,人機交互和智能控制領域。他在機器人和自動化系統的開發方面擁有豐富的經驗,如遠程呈現機器人、無人海面車輛、爬樹機器人、四輪獨立轉向和駕駛車輛、工業6軸機器人臂系統、救援機器人、家庭服務機器人和教學機器人。
他獲得了40多項專利,曾被眾路透社、探索頻道、福布斯和IEEE頻譜等報道。他發表了2篇專著,6篇國際期刊論文,近30篇國際會議論文。林教授擔任TRO、JFR、ICRA和IROS等機器人和自動化領域的主要國際期刊和會議論文的聯合主席和審稿人。他的一篇期刊論文于2011年獲得IEEE / ASME T-MECH最佳論文獎。

03
?孫正隆教授,香港中文大學(深圳)理工學院研究助理教授。孫正隆教授先后于2005年和2007年獲得新加坡南洋理工大學生物醫學工程學士學位和機電一體化系統與設計碩士學位。2008年,他在美國約翰霍普金斯大學擔任訪問學者。2013年,他獲得南洋理工大學博士學位,并開始在新加坡科技與設計大學SUTD-MIT國際設計中心進行博士后研究。他的主要研究領域包括醫療設備研發、系統建模、力傳感與控制以及人機交互等。